
OpenGL uses matrix operations for a lot of purposes. For example, translations, scaling, rotations. Also computing of projection matrices, view matrices etc.
OpenGL uses 4x4 matrix used in homogenous coordinate system. Where each coordinate is represented as [x,y,z,w].Where w=1 for the affine transformations such as translations, scaling, rotations. W can be any floating point number in the range -1.0 to 1.0 for projection matrices. During rasterization x, y, z coordinates are computed as x/w, y/w and z/w. This is known as perspective divide.
OpenGL uses columnar matrix multiplication as shown below.

Identity Matrix
A special matrix having all elements along diagonal as 1 as shown below.
It is associative, I*M = M*I = M. It's used in the computation of rotation, translation and scaling as discussed below.

Translation Matrix
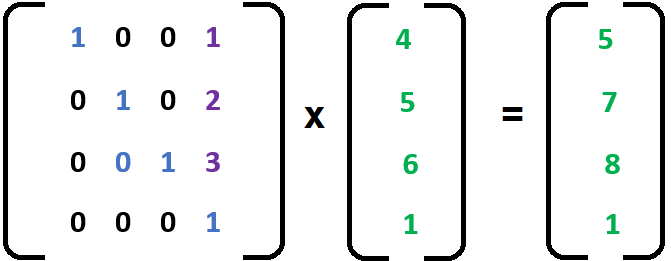
Translation matrix is used for moving around 3d objects.

Example:
Let's say there is a point [1,2,3] and want to translate by [4,5,6]. It can be accomplished as below. Resulting in [5,7,9].
Scaling Matrix
Scaling matrix is used for Shrinking or Expanding 3d objects.

Example:
Let's say there is a point [1,2, 3] and want to scale by [2,2,2]. It can be accomplished as below. Resulting in [2,4,6].

Rotation
In 3D, rotation happens independently on three cardinal axes X, Y, and Z.
Pitch or Rotation on X axis
The following matrix represents rotation matrix on X axis.

Example:
Let's say there is a point [1,2, 3] and want to rotate by 90 degrees in X axis. It can be accomplished as below. Resulting in [1,-3,2].

The following matrix represents rotation matrix on Y axis.

Example:
Let's say there is a point [1,2, 3] and want to rotate by 90 degrees in Y axis. It can be accomplished as below. Resulting in [3,2,-1].

Roll or Rotation on Z axis
The following matrix represents rotation matrix on Z axis.

Example:
Let's say there is a point [1,2, 3] and want to rotate by 90 degrees in Z axis. It can be accomplished as below. Resulting in [-2,1,3].











{kind=link}